OS第二次理论作业
1.多道程序的存储管理
- 空间的分配:分区式分配,将内存分为一些大小相等或不等的分区,每个应用程序占用一个或几个分区,操作系统占用其中一个分区
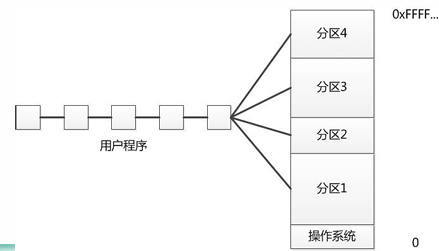
1.1 固定(静态)式分区分配
当系统初始化时,把存储空间划分为若干个任意大小的区域,然后将这些区域分配给每个用户作业
- 将内存划分为若干个固定大小的连续分区
- 分区大小相等:多个相同程序的并发执行
- 分区大小不等:多个小分区,适量的中等分区,少量的大分区
- 优点:易于实现,开销小
- 缺点:内碎片造成浪费,分区总数固定,限制了并发执行的程序数目
- 采用的数据结构:分区表——记录分区的大小和使用情况
1.1.1 单一队列分配方式
需要加载程序时,选择一个当前闲置且容量足够大的分区进行加载,即多个用户程序排在一个共同的队列中等待分区
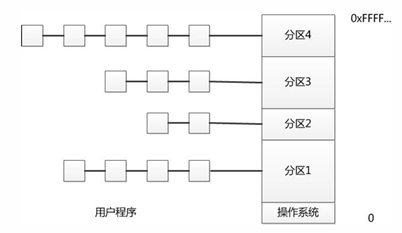
1.1.2 多队列分配方式
防止单一队列造成的小程序占用大分区的情况,采用多个队列,每个分区一个队列,程序按照大小排在相应的队列中,即小分区排队的都是小程序,大分区排队的都是大程序
1.2 可变(动态)式分区分配
可变式分区:分区的边界可以移动,即分区的大小可变
- 优点:没有内碎片
- 缺点:有外碎片
1.2.0 内碎片与外碎片
- 内碎片:分配给作业的存储空间中未被利用的部分,如固定分区中存在的碎片
- 内碎片其实已经被分配出去了,只是没有被利用,在作业完成后会得到释放
- 外碎片:系统中无法利用的小的空闲分区,如分区与分区之间存在的碎片,动态分区管理会产生外部碎片
- 消除外部碎片的方法:紧凑技术
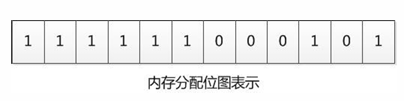
1.2.1 位图表示法
- 给每个分配单元赋予一个字位,用来记录该分配单元是否闲置。字位取值为0表示单元闲置,取值为1表示已被占用
- 空间成本固定,不依赖于程序中的程序数量
- 时间成本低,操作简单,直接修改位图值
- 没有容错能力:无法确定是为1还是因错误变为1
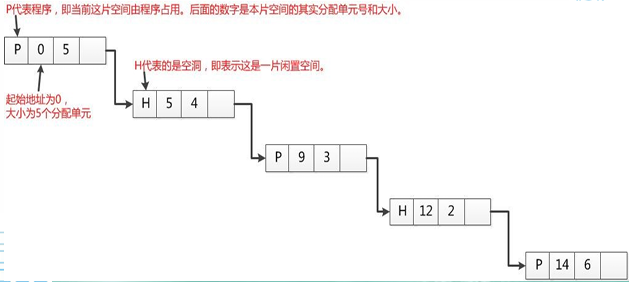
1.2.2 链表表示法
- 将分配单元按照是否闲置链接起来
- 空间成本取决于程序的数量
- 例如空闲链表,将内存中空闲的区域以链表的形式穿起来
- 时间成本:链表扫描速度较慢,还要进行链表项的插入删除和修改
- 有一定容错能力,链表有被占空间和闲置空间的表项,可相互验证
1.3 基于顺序搜索的分配算法
- First Fit:每个空白区按其在存储空间中地址递增的顺序连载一起,在为作业分配存储区域时,从这个空白区域链的始端开始查找,选择第一个足以满足请求(够大)的空白块
- Next Fit:把存储空间中的空白区构成一个循环链,每次为存储请求查找合适的分区时,总是从上次查找结束的地方开始,只要找到一个足够大的空白区,就将他划分后分配出去
- Best Fit:为一个作业选择分区时,总是寻找其大小最接近于作业所要求的存储区域
- Worst Fit:为作业选择存储区域时,总是寻找最大的空白区
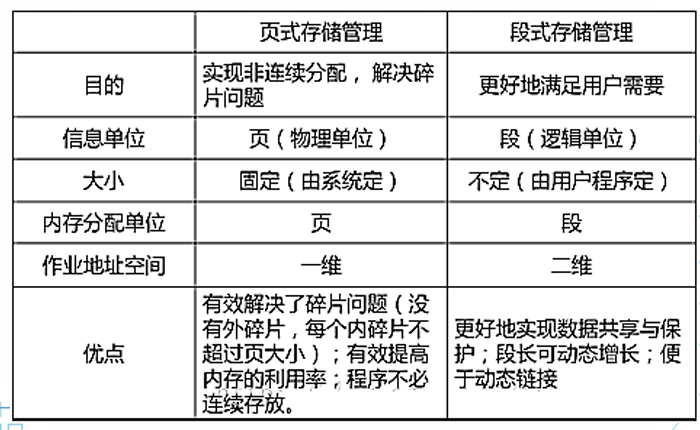
2.页式内存管理
从方便管理物理内存的角度考虑
2.1 程序、进程和作业
- 程序:程序是静止的,是存放在磁盘上的可执行文件
- 进程:进程是动态的,进程包括程序的程序处理对象(数据),是系统分配资源的基本单位,分为系统进程和用户进程,进程有生命周期
- 作业:作业是用户需要计算机完成的某项任务,是要求计算机所做工作的集合,一个作业可以有多个进程
2.2 分页式存储管理
把一个逻辑地址连续的程序分散存放到若干不连续的内存区域内,充分利用内存空间,逻辑上相邻的页,物理上不一定相邻
页:在页式存储管理系统中,把每个作业的地址空间分成一些大小相等的片,称之为页
存储块(页框):把主存的存储空间也分成与页面大小相同的片,这些片称为存储块或页框
地址结构:页号+页内位移
给定逻辑地址空间中的地址为A,页面的大小为L,则
- 页号P=int(A/L)
- 页内地址偏移D=A mod L
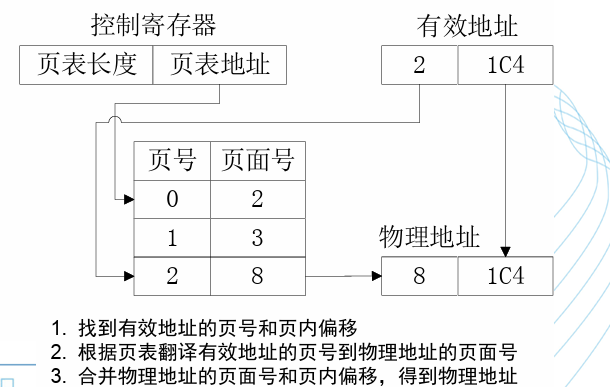
2.3 一级页表
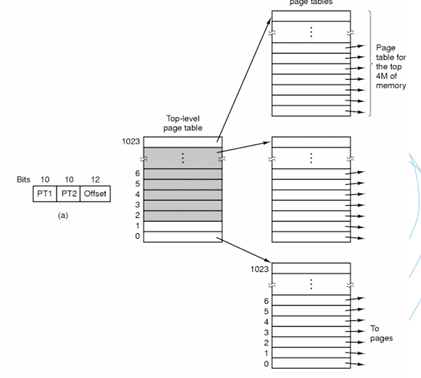
2.4 两级页表
一级页表的问题:若逻辑地址空间很大,则划分的页比较多,页表很大,占用的存储空间很大且要求连续,较难实现
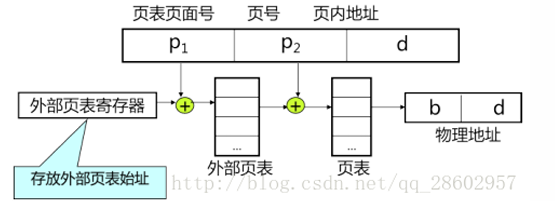
将页表再进行分页,离散地将各个页表页面存放在不同的物理块中,同时再建立一张外部页表用以记录页表页面对应的物理块号
在运行过程中,必须把外部页表(页表的页表)调入内存,而动态调入内部页表,只将当前所需的一些内部页表装入内存,其余部分根据需要再陆续调入
- 地址:页表页面号+页号+页内地址
2.5 多级页表
- 多级页表结构中,指令所给出的地址除偏移地址之外的 各部分全是各级页表的页表号或页号,而各级页表中记录的全是物理页号,指向下级页表或真正的被访问页
2.6 TLB
TLB是页表的Cache,用于减少访问内存的次数,缩短时间
2.7 MMU
CPU中用于进行虚拟地址与物理地址转换的单元,MMU中有TLB,得到VA后首先在TLB中进行查找,找不到再去页表中查找
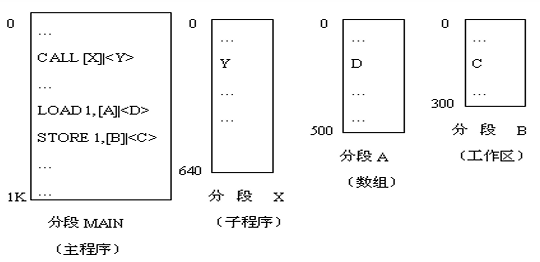
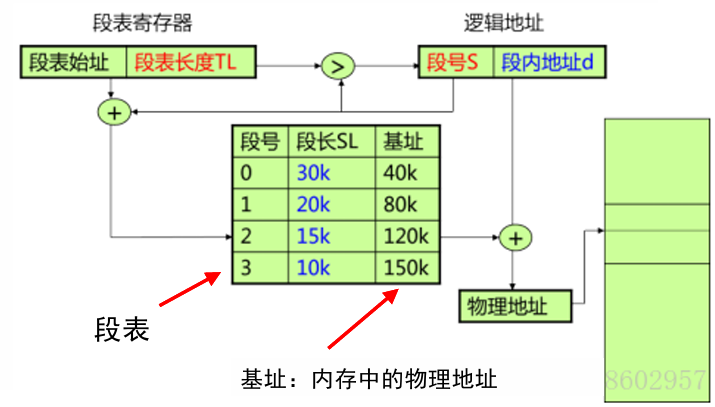
3.段式内存管理
从方便用户编程的角度考虑
一个段可以定义为一组逻辑信息,每个作业的地址空间是由一些分段构成的,每段都有自己的名字,且都是一段连续的地址空间(长度不定)
地址结构:段号S+位移量W
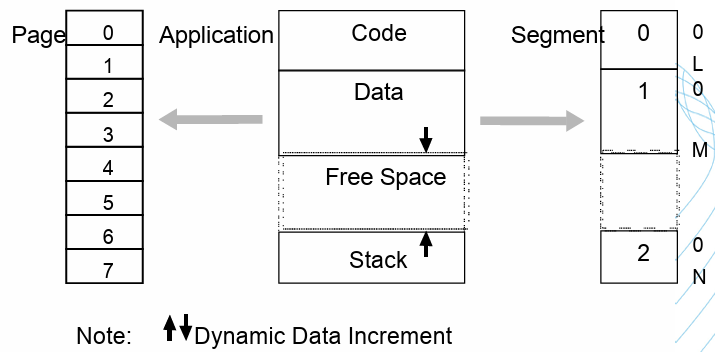
关于地址维数
- 对于页式管理,一个程序的各页是根据程序空间连续编址的,程序地址空间只有一维
- 对于段式管理,一个程序依据信息特性拆分为多段,各段之间独立编址,故地址空间有两维
可以更好地满足程序内存动态增长的情况
4.段页式内存管理
- 先将用户程序 分成若干个段(段式),并为每一个段赋一个段名,再把 每个段分成若干个页(页式)
5.虚拟存储管理
5.1 交换
附.第二次理论作业
1.动态内存分配需要对内存分区进行管理,一般使用位图和空闲链表两种方法。128MB 的内存以n字节为单元分配,对于链表,假设内存中数据段和空闲区交替排列,长度均 为64KB。并假设链表中的每个节点需要记录32位的内存地址信息、16位长度信息和16 位下一节点域信息。这两种方法分别需要多少字节的存储空间?那种方法更好?
使用位图:为每个单元分配1bit,128MB内存被划分为$\frac {2^{27}} n$个单元,需要使用$\frac {2^{27}} n$个bit,即$\frac {2^{24}} n$个字节
使用空闲链表:每个节点$32+16+16=64bits=8bytes$,内存中有$\frac {2^{27}} {2^{17}} = 2^{10}$个空闲分区,故空闲链表需要$2^{13}$个字节
进行比较:当$n>2048$时,使用位图所占用的内存空间更小,位图法更好,当$n<=2048$时使用空闲链表的方法更好
**2.在一个交换系统中,按内存地址排列的空闲区大小是: 10KB、4KB、20KB、18KB、7KB、 9KB、12KB和15KB。对于连续的段请求:12KB、10KB、9KB。使用FirstFit、BestFit、 WorstFit和NextFit将找出哪些空闲区? **
| 空闲区号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| 空闲区大小 | 10KB | 4KB | 20KB | 18KB | 7KB | 9KB | 12KB | 15KB |
使用First Fit:
- 12KB会使用编号为3的大小为20KB的空闲分区
- 10KB会使用编号为1的大小为10KB的空闲分区
- 9KB会使用编号为4的大小为18KB的空闲分区
使用Best Fit:
- 12KB会使用编号为7的大小为12KB的空闲分区
- 10KB会使用编号为1的大小为10KB的空闲分区
- 9KB会使用编号为6的大小为9KB的空闲分区
使用Worst Fit:
- 12KB会使用编号为3的大小为20KB的空闲分区
- 10KB会使用编号为4的大小为18KB的空闲分区
- 9KB会使用编号为8的大小为15KB的空闲分区
使用Next Fit:
- 12KB会使用编号为3的大小为20KB的空闲分区
- 10KB会使用编号为4的大小为18KB的空闲分区
- 9KB会使用编号为6的大小为9KB的空闲分区
3.解释逻辑地址、物理地址、地址映射,并举例说明。
- 逻辑地址是操作系统的用户编写应用程序时所用的地址,物理地址是内存中实际的地址,地址映射是指逻辑地址向物理地址转换的过程
- 举例来说,对32位的MIPS体系结构而言,每一个进程都拥有独立的4GB逻辑地址空间,每一个区域的地址空间有其特定的用途,kuseg、kseg0、kseg1和kseg2都有各自的地址映射方式。MIPS体系结构广泛应用于不同硬件条件的嵌入式系统,具体机器的物理内存和物理地址不尽相同,但逻辑地址到物理地址的映射按区域基本确定,有通过MMU转换的区域,也有直接高位清零转换的区域。
4.解释页式(段式)存储管理中为什么要设置页(段)表和快表,简述页式(段式)地 址转换过程。
页式存储管理的目的是高效利用内存,减少内存碎片的产生,并实现大逻辑空间映射小物理空间。使用页式内存管理就需要存储一张页表,用于记录逻辑页向物理页的映射。由于查询页表会增加一次访问内存,影响性能,于是设计了快表(TLB),即页表的高速缓存(cache),在查找页面映射时先查找快表,若命中则无需查询页表,若未命中则需要查页表,并将对应的页表项替换到快表中。
将逻辑地址划分为页号和页内偏移两个部分,只需要找到对应的物理页号再加上页内偏移即可找到物理地址。首先在TLB中查找页号,若命中则将它对应的物理页号加上页内偏移得到物理地址,若TLB未命中,则在内存中查页表,将对应的页表项替换进TLB,再得到物理内存进行访存
5.叙述缺页中断的处理流程。
缺页中断:软件试图访问已经映射在虚拟地址空间中,但是还未被加载在内存中的一个分页时发生中断,需要从外存中将该页调入内存
若此时内存中还有空闲块,则直接将缺页从外存中调入内存,若内存已满,则需要采用页面置换算法淘汰某页再进行调入。
**6.假设一个机器有38位的虚拟地址和32位的物理地址。 (1) 与一级页表相比,多级页表的主要优点是什么? (2) 如果使用二级页表,页面大小为16KB,每个页表项有4个字节。应该为虚拟地址中 的第一级和第二级页表域各分配多少位? **
多级页表为页表再设置页表,实行动态页表调入,只需要将当前使用的页表项所在的页调入内存,减少了内存中存储页表的空间
页内偏移地址为14位,则全部页表项所占空间:$2^{24}*4=2^{26}bytes$,将一级页表再划分,可分为$2^{12}$页,则二级页表的页表域为12位,一级页表的页表域为12位。
7.假设页面的访问存在一定的周期性循环,但周期之间会随机出现一些页面的访问。例 如:0,1,2…,511,431,0,1,2…511,332,0,1,2,…,511等。请思考: (1) LRU、FIFO和Clock算法的效果如何? (2) 如果有500个页框,能否设计一个优于LRU、FIFO和Clock的算法?
- 访问的页面符合局部性原理,三种算法产生的缺页中断相同
- 尽量把工作集装入内存,将0-498页面映射到固定的页框,每次只置换第499个页面
8.一个交换系统通过紧缩技术来清理碎片。如果内存碎片和数据区域是随机分配的。而 且假设读写32位内存字需要10nsec. 那么如果紧缩128MB的内存需要多久?简单起见, 假设第0个字是碎片的一部分而最高位的字包含了有效的数据。
每个字节的读写时间为2.5ns,$128MB=2^{27}B$,对每个字节既要读又要写,需要$22.52^{27}=671ms$